基于夹持力反馈系统的肿瘤血管检测

在神经内窥镜手术中,例如脑肿瘤,手术空间的特点通常比其他内窥镜手术狭窄,是通过内窥镜目视检查确定的。然而,当出血发生时,手术部位会被血液覆盖,破坏视觉。外科医生可能想要切除少量出血的肿瘤,但可能无意中切除了肉眼无法确认的肿瘤血管。因此,在脑肿瘤切除过程中识别血管的存在是至关重要的。到目前为止,许多研究已经开发出了检测看不见的血管的方法。尽管如此,这种方法的进一步发展是至关重要的。
在腹腔镜手术中,血管可以通过一个力/触觉反馈系统。但在神经外科中,由于目标血管的厚度与腹腔镜手术不同,现有的力/触觉反馈方法难以检测血管。此外,在神经内窥镜下进行脑肿瘤切除术时手术部位由于手术空间非常狭窄,即使是轻微出血,也常被血覆盖。
Kanazawa大学机械工程和医学领域的科学家合作开发一种检测肿瘤内血管的方法,这些血管在视觉上无法检测到。他们以前开发了一种具有力反馈系统的外科机器人操纵器,并证明了系统在神经外科的益处。然而,如上所述,使用现有力/触觉反馈系统的检测使用现有力/触觉反馈系统难以困难。
在这项研究中,他们开发了一种新型血液船采用主从手术机器人系统的检测方法,该系统在操作部分带有一个力传感器。该方法基于夹持力检测血液搏动。
如果肿瘤中有细动脉,应在夹持器上应用适当的力传感器检测这种动脉的搏动。但是,由于肿瘤的硬度有很大的不同,所以这种脉动传感系统应该同时适用于软肿瘤和硬肿瘤。此外,由于动脉搏动比肿瘤夹击力小得多,这种传感器系统必须能够在夹击肿瘤时检测微小的力变化,并有足够的响应时间来检测搏击。
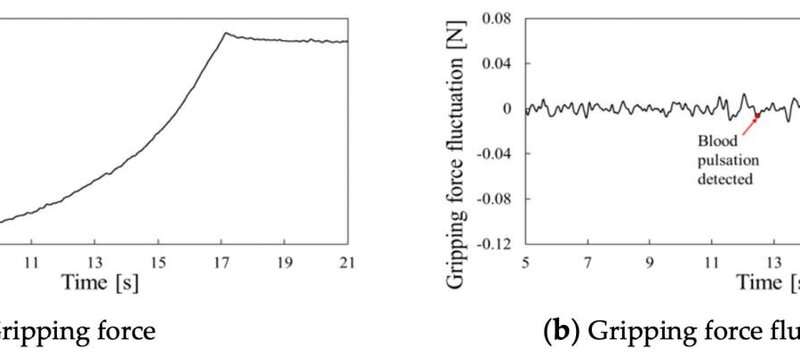
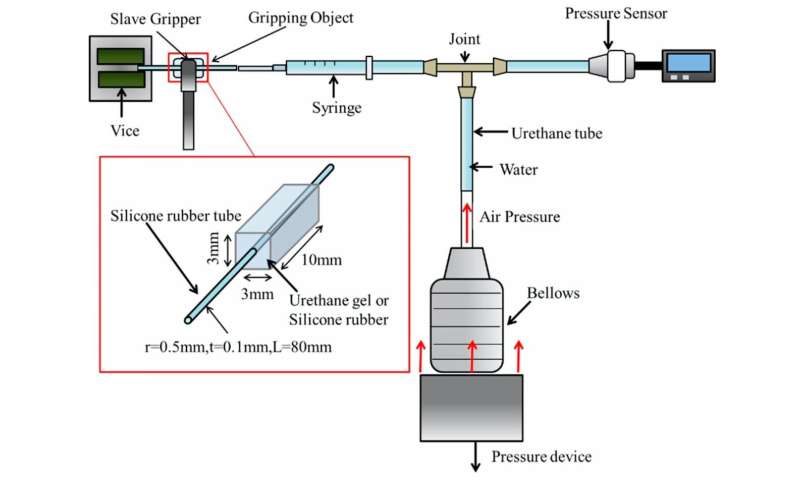
在本研究中,如图1左所示,开发了一个直径为3mm的夹持器。夹持器中集成的力传感器检测并记录肿瘤中动脉的跳动,以及夹持肿瘤时的夹持力。由于人体搏动约为每分钟70次,测力的时间间隔被设置为5毫秒。如图1左侧第二个面板所示,检测到脉动,可以测出其频率。
用添加10%盐的氨基甲酸乙酯凝胶或硅橡胶制成模拟软硬肿瘤。模拟肿瘤尺寸为3 × 3 × 10mm,沿长轴中心置入半径为0.5 mm、厚度为0.1 mm的硅橡胶管作为模拟动脉。预实验测得聚氨酯凝胶和硅橡胶的杨氏模量分别为6 kPa和38 kPa。在流体分析研究中脑动脉瘤,正常脑组织血管壁的杨氏模量为1 MPa,而初步实验测得的硅橡胶管杨氏模量为1.9 MPa。水以1.2 Hz的脉动通过该模型动脉来模拟血流。
将开启角度为34°的夹持器设定为0°,并调整闭合速度。图2显示了使用聚氨酯凝胶的结果之一。使用聚氨酯凝胶,模拟软肿瘤,在30°(4°孔径)下检测脉动。另一方面,用硅橡胶作为模拟硬肿瘤,在15-25°(9-19°孔径)处检测到脉动。
因此,科学家们在检测中取得了成功脉动模拟软硬肿瘤中直径为1mm的模拟脑动脉。尽管他们只给出了在夹持过程中检测模拟肿瘤内部脉搏的基本结果,但他们相信这个新系统对外科医生很有用。如果医生怀疑血管在一个肿瘤内,然后抓住肿瘤可以延长确定血机械手夹持力波中的脉冲。虽然该方法的检测精度和速度有待提高,但在肿瘤切除过程中应能有效避免出血,为肿瘤切除提供了一种途径肿瘤切除。
进一步探索
















用户评论